Facilities
arsl duke lab (Room 370)
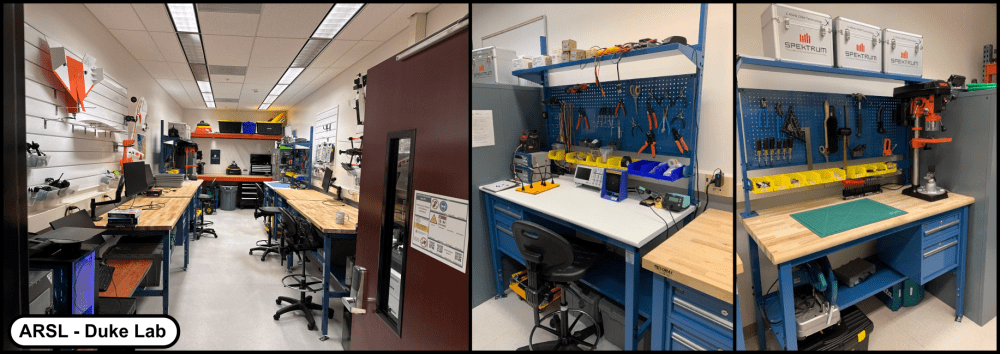
The ARSL Duke Lab is a space dedicated to the fabrication, integration, and testing of robotic systems and related control algorithms. The lab has several workbenches with a variety of fabrication tools (e.g., benchtop drill press, bandsaw, 3D printer, power and hand tools), electronics equipment (DC power supplies, oscilloscopes, multimeters, soldering station, etc.), and assorted robotic sensors, communication/radio equipment, micro-controllers, autopilots, and embedded computers. A high-performance Linux workstation is available for simulation and data analysis (AMD Threadripper 3990X 64-core CPU, 2.9 GHz, 256 GB RAM).
arsl batt cave lab (Room 124)
The ARSL BATT CAVE Lab is a 270 sq. ft. area focusing on marine robotics and includes a large water tank housed in a larger 9,000 sq. ft. high bay with 30 ft. high ceilings. The marine robotics testbed is a custom-built 5,000 gallon water tank with two large acrylic viewports and is instrumented with a positioning and communication system to control a fleet of miniaturized unmanned underwater vehicles (UUVs). The facility supports controlled laboratory experiments investigating cooperative control of multi-vehicle systems, bio-inspired robotics, and testing of subsystems/components of larger (outdoor) marine robots and marine systems such as wave energy converters.

Robotic Platforms and sensors
The ARSL has several off-the-shelf and student-built air, ground, and marine robots, including:
- Seafloor Systems Hydrone USV
- Two custom-built autonomous surface vessels (ASVs) with various sensor options, including a single-beam echo sounder (Blue Robotics Ping), low-cost side-scan sonar (Humminbird Helix 9 with SARHAWK), and YSI EXO2 Multiparameter Water Quality Sonde (dissolved oxygen, algae, turbidity, temperature)
- Clearpath robotics Jackal (Ouster OS1 LiDAR, stereo cameras, and Intel Realsense depth camera)
- Blue Robotics ROV
- Three QAV 500 V2 custom-built quadrotor drones with Trisonica mini 3-axis anemometers
- DJI FPV Drone
- MiniUUV: a custom-built miniature underwater vehicle
- Fixed-wing GT Zohd Talon UAV with gimbaled RGB camera
- Swarm of indoor Crazyflie 2.0 drones with Loco Positioning System
- Emlid RTK GNSS
- SIYI ZR10 3-axis gimbaled camera, FLIR BlackFlyS cameras

University shared resources
- UNC Charlotte Super Fab Lab: UNC Charlotte is the first public university in the U.S. to establish a Super Fab Lab, a distinction recognized by The Fab Foundation, a non-profit based out of the Massachusetts Institute of Technology (MIT) Center for Bits and Atoms. The facility includes precision CNC mills, CNC routers, a variety of 3D printers including for carbon-fiber and composite parts, precision/laser cutters, embroidery machines, and many other tools.
- MEES Recharge Unit – Machine Shop: A wide range of equipment is available for conventional machining, precision machining, and superfinishing processes, all equipped with advanced acquisition systems for monitoring forces, temperatures, strains, and chatter analysis during the process.
- University Research Computing (URC): The University Research Computing (URC) Group was established in 2003 to promote research on campus through integrating leading-edge HPC for the faculty, staff and students of UNC Charlotte.